是cartographer建图代码的一些理解和思路,对于学习代码有很好的作用.
”Cartographer建图 机器人 SLAM Cartographer源码“ 的搜索结果
cartographer建图。 catkin_make -DFORCE_DEBUG_BUILD=True。 roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/cartographer_paper_deutsches_museum.bag roslaunch cartographer_ros ...


使用Livox Mid-360雷达及其内置IMU实现Cartographer建图与定位。 压缩文件内包含建图和定位对应的launch文件和lua配置文件。
cartographer的使用与操作笔记

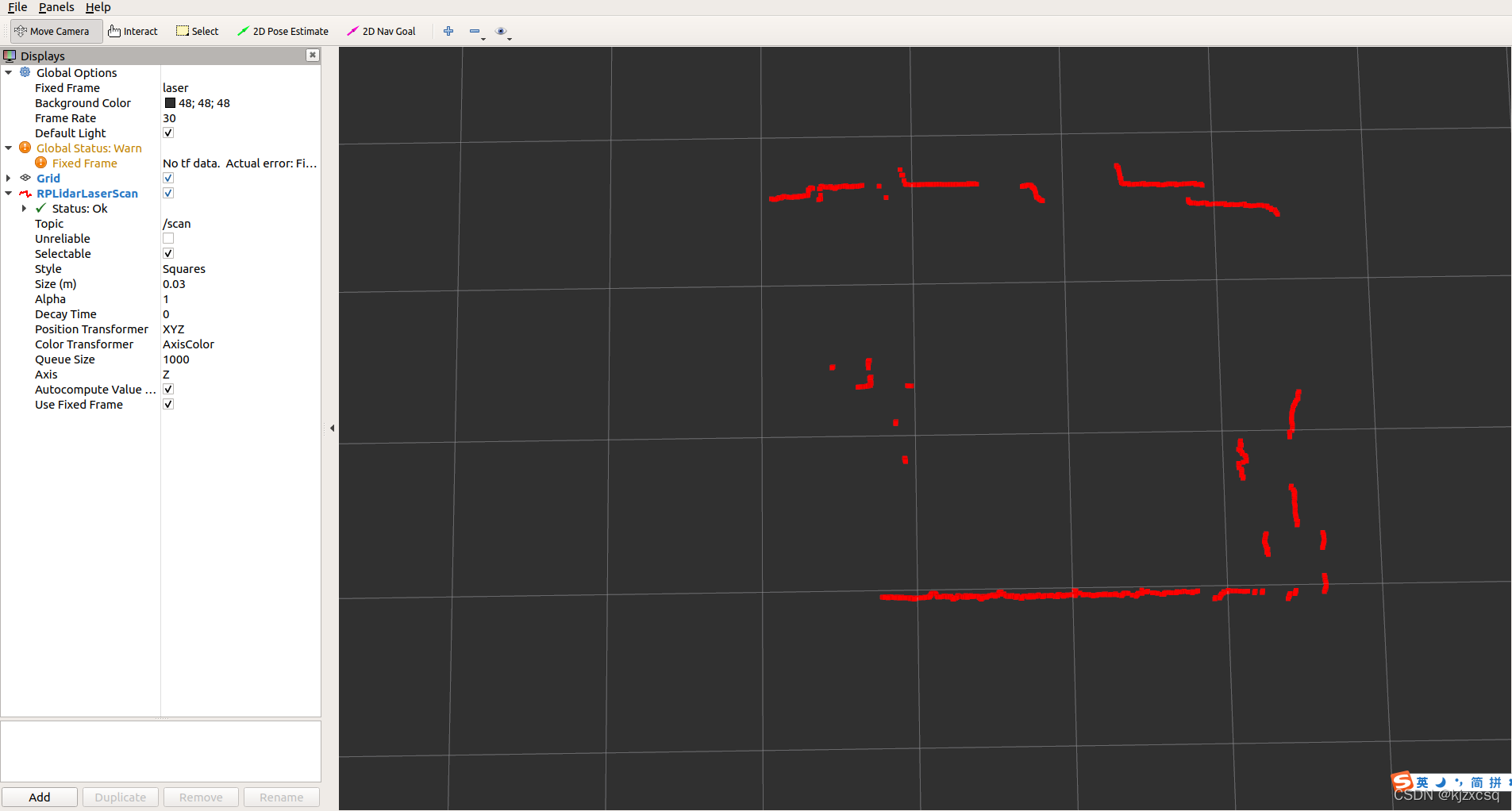
cartographer建图-Rviz插件修图
1、平台 硬件平台:中继四轮电机底盘(结合IMU提供校准确的odom数据),velodyne16线激光雷达 (只取其远距离的单线数据scan) 软件平台:ubuntu18.04下ros系统...见cartographer建图(1) 注意:tf树有些变化 ...

厦门大学博客参考:Cartographer使用流程-建图-纯定位-导航 map_frame = "map", tracking_frame = "base_link", published_frame = "odom", odom_frame = "odom", provide_odom_frame = false, use_odometry = true...
1.在每次启动launch文件时,都要在启动前设置环境变量(在工作环境下) source install_isolated/setup.bash
roslaunch cartographer_ros demo_backpack_2d.launch bag_filenames:=XXX.bag ``
硬件:turtlebot2机器人,velodyne激光雷达 软件:ubuntu18.04,ros velodyne激光雷达作为3D激光雷达,最远距离为100m 详情见https://blog.csdn.net/zbr794866300/article/details/99305864?spm=1001.2014.3001.5502...

环境:gazebo 11机器人有urdf,tf树最上层为base_link,无里程计和imu直接使用vlp-16点云数据建cartographer 2d图文章内容如有错误,欢迎指出交流。

建图效果:https://www.bilibili.com/video/BV13K4y1m76s/视频里效果不错 原创:使用思岚A2激光雷达结合cartographer建图算法手持建图 我用的是思岚A1和镭神ls01b 后续写launch贴上来
cartorapher1.0_ws建图环境成功配置,protobuf-3.5.0.能成功编译。

cartographer的回放包命令、编译命令、启动rviz窗口命令。
Cartographer的学习
本文档为谷歌的cartographer建图lua文件。该lua文件是基于真实机器人建图,经过修改可以应用到任何差速机器人上。不需要修改或者只需要修改机器人基座标即可使用。

cartographer仿真建图实现记录
您提到的问题是关于Cartographer建图结果随着机器人运动而旋转的情况。这种情况可能是由于机器人在建图过程中的运动不稳定或者传感器数据的不准确导致的。 要解决这个问题,您可以考虑以下几点: 1. 传感器校准:...
cartographer也调试了一段时间,并使用它进行了室内的建图和定位导航,在这里对它的建图参数调试进行一个说明,希望能帮助到一些朋友。
SLAM、ROS、Cartographer
目前手上只有个16线的激光雷达,想在房间跑一下建图,目的是能够跑通就可以. 1,启动激光雷达, 2,将激光雷达3d点云转成2d laserscan数据类型 3,启动cartographer包roslaunch cartographer_ros agv_2d.launch ...
推荐文章
- Python菜鸟晋级04----raw_input() 与 input()的区别_pycharm没有raw input-程序员宅基地
- 高通AR增强现实多卡识别和扩展跟踪Unity_imagetarget扩展追踪-程序员宅基地
- 对于三星手机的手工root方法-程序员宅基地
- 2021年佛山高考成绩查询,2021年高三佛山一模,看佛山高中排名-程序员宅基地
- 删除并清空应收应付模块 期初数据_应付管理系统怎么清除数据-程序员宅基地
- 嵌入式固件加密的几种方式-程序员宅基地
- 非root情况下访问手机存储位置权限的方法_不root 通讯录 存放目录-程序员宅基地
- Mybatis项目开发流程_使用mybatis的开发步骤-程序员宅基地
- 三方协议,档案,工龄,保险,户口,-程序员宅基地
- 华为交换机命令 端口速率_华为S5700交换机的端口QOS限速问题-程序员宅基地